三、算法设计
频域干扰抵消(AIC,Adaptive Inte
(1)对自适应滤波器的个频域抽头系数作初始化设置;
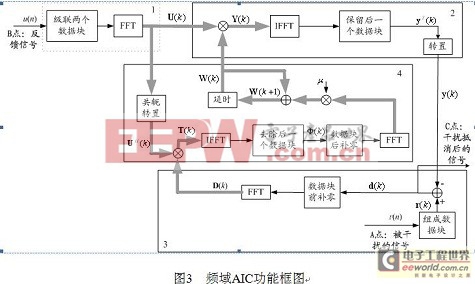
(2)将滤波器的时域连续输入信号每个组成一个块,然后级联两个数据块做点离散快速傅立叶变换,使其转换为频域信号,并将此信号用作自适应滤波器的输入;其中是该滤波器抽头个数的2倍,即;
(3)将通过滤波器得到输出信号,然后进行快速傅立叶逆变换IFFT(inverse fast fourier transforms)处理,使其转换为时域信号,作为干扰的估计值;
(4)计算被干扰信号和的差值,即为干扰抵消后的信号;再产生该期望信号的频域值为下一次滤波器抽头系数迭代所使用;
(5)利用频域信号进行最小均方误差LMS计算,即根据和对进行更新,并将此更新值返回到步骤(2)中使用。跳转到步骤(2)进行反复迭代,直至干扰被抵消。
与传统的时域LMS算法相比,利用频域LMS算法可以降低计算复杂度。假设输入为实信号,滤波器抽头个数为。可以得到,频域LMS和时域LMS的计算复杂度之比为。实际中,干扰在空中传输的时延(即图4-9中E到B点的传输时延)会比反馈信号的时延(即图4-9中E到H点的传输时延)大得多,这时需要较大的抽头个数才能抵消干扰。假设,则频域LMS算法可以比时域LMS算法的速度提高大约16倍。为简化起见,在本文档中取,利用频域LMS算法,在计算量角度大约可以比时域LMS算法快1.5倍。
四、WCDMA同步算法简介
对于任何一个系统,要进行正常的运作都必须首先保证系统的同步。WCDMA的小区搜索分为三个阶段,即主同步、辅同步和导频搜索三个阶段。主同步利用PSC码对接收到的主同步信道数据(PSCH)做相关,根据相关峰值的位置确定时隙头。在主同步完成之后,辅同步阶段可以确定帧头位置和当前小区使用的扰码组号。方法是用辅同步码(SSC)去做相关。最后一个阶段是导频搜索,利用已经得到的扰码组号和帧头信息,遍历一个主扰码组所有的8个可能主扰码,分别和导频信道(CPICH)做相关。根据最大的相关值最终确定扰码号。可见,经过WCDMA的三步同步,就可以得到当前小区的主扰码号和帧同步信息。三步同步的流程图如图4所示。

由于同步模块收到的信号为4采样的,而同步模块内部的搜索过程只需利用单采样的数据,因此先要对过采样的信号进行下采样。另外,为了对发送信号源进行匹配,将接收到的信号首先经过根号升余弦匹配滤波器,然后再下采样到码片速率,如B点所示。